New Technology Paradigms Often Collide With Established Behaviour Norms
Year Developed / 2018 Post Grad Design Thesis
Category / Speculative Design for Cycling Outerwear
Outcomes / CORE77 Design Awards 2019 Winner, IDSA IDEA Bronze Award 2019 Winner
// The Challenge
Autonomous Vehicles (AVs) struggle to detect and respond accurately to cyclists, who pose unique challenges due to their speed, agility, and unpredictability. This design aimed to enhance cyclist visibility to AV sensors and AI through a novel passive or active communication/interference method. The solution targets low-visibility conditions—such as nighttime, poor weather, and dense urban environments—and was validated through tests simulating AV perception systems, as well as user interviews and ethnographic research to understand cyclist behaviors and needs
How might we increase accurate detectability of cyclists by AVs as this emerging technology moves towards maturity?
// Problem Breakdown

Autonomous Vehicles (AVs) face several challenges in detecting bicycles. Due to their low mass and minimal surface area, bicycles are difficult for LiDAR and radar to accurately identify, leaving much of the detection work to cameras. Their agile and unpredictable movements further complicate AV predictive systems. Environmental factors such as harsh weather impair LiDAR performance, while cameras struggle in low-light or nighttime conditions. Additionally, AI systems are prone to misclassifying objects (false positives/negatives), which can result in unsafe responses by the AV.
// Opportunity and solution Search
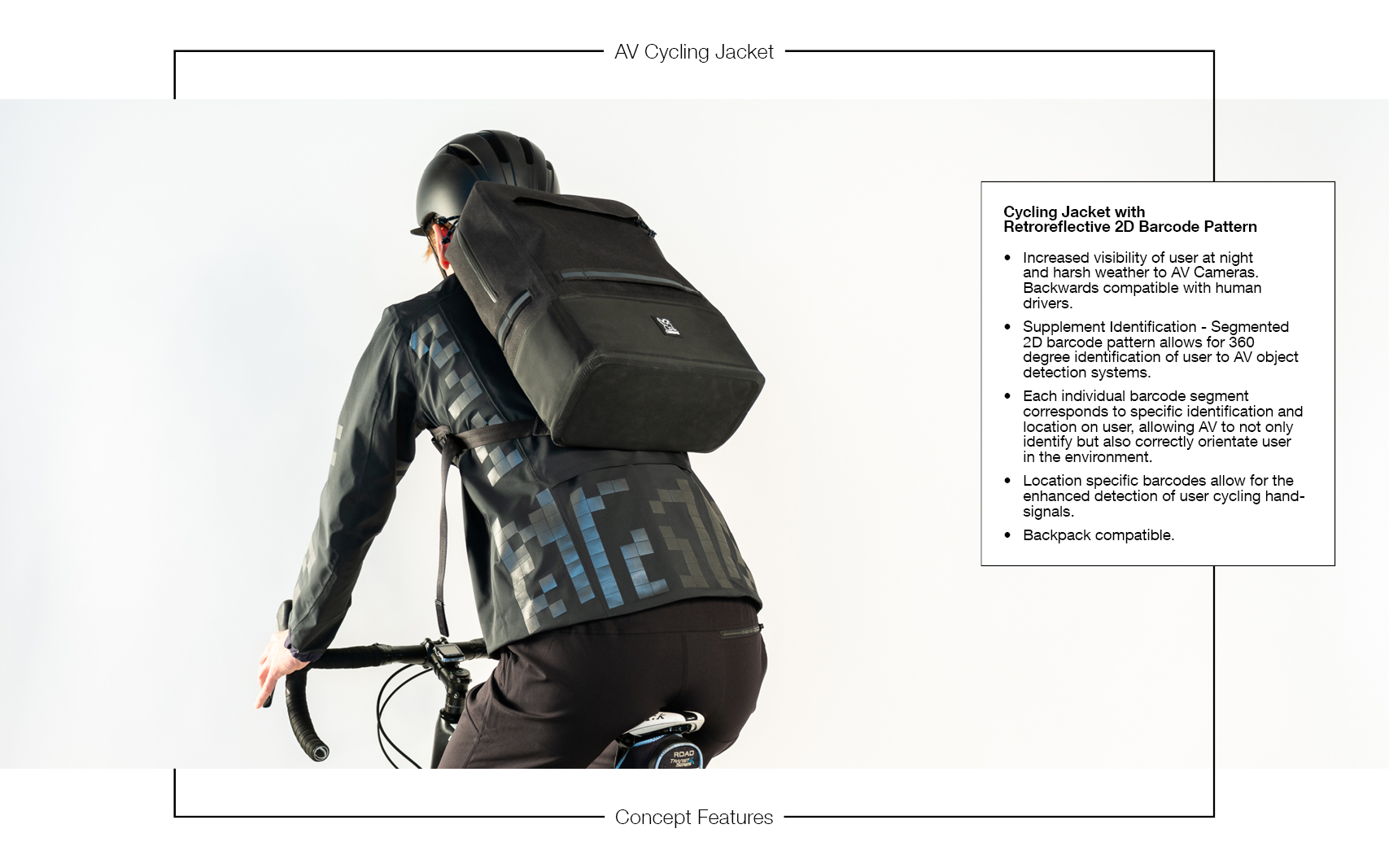
Several passive methods were explored to improve cyclist visibility and communication with AVs. Option 1 - retroreflective materials to enhance visibility in low light by reflecting AV headlights back to the cameras. Option 2 - 2D barcodes as a way to passively convey information to AVs, especially when made retroreflective for night and weather resilience. Option 3 suggests 360° barcode placement on a cyclist's body to help AVs understand orientation and positioning.
// Preliminary Concept Validation
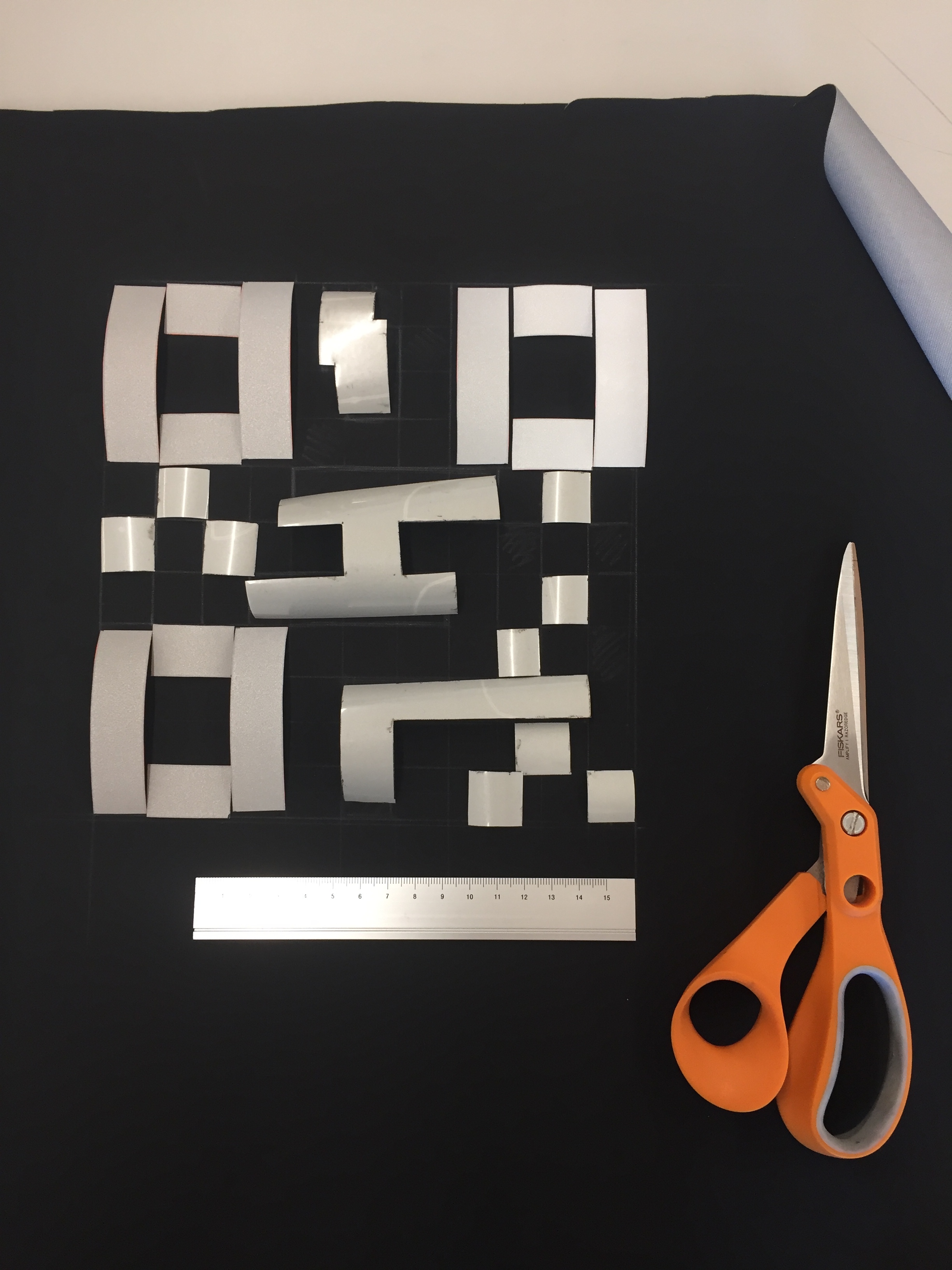
To validate the concept, a test simulated an AV camera system using a 20x20 cm retroreflective QR code placed on black fabric, viewed from 40 meters at night in heavy fog. Under these harsh conditions—where LiDAR is impaired and only well-lit objects are visible to cameras—the retroreflective QR code was clearly visible and distinguishable in the video. This confirmed that retroreflective 2D barcodes are a viable method for enhancing cyclist visibility and communication with AVs in poor environmental conditions.



// Jacket Surface Analysis
With the selection of the cycling jacket to carrying the design concept forward, an understanding of the garment and the dynamic factors of rider movement, body position, and how they effect fabric movement and surface distortion needed to be established. An understanding of these factors of the garment and materials informed placement and design of the retroreflective code.
A jacket mock-up was created with a checkered pattern of 1x1 inch squares on the exterior surface. This was photographed simulating cyclists riding positions and hand movements where taken to see how much jacket surface area would be covered and what fabric distortion would occur.





// Sketching Concepts

Mood Board

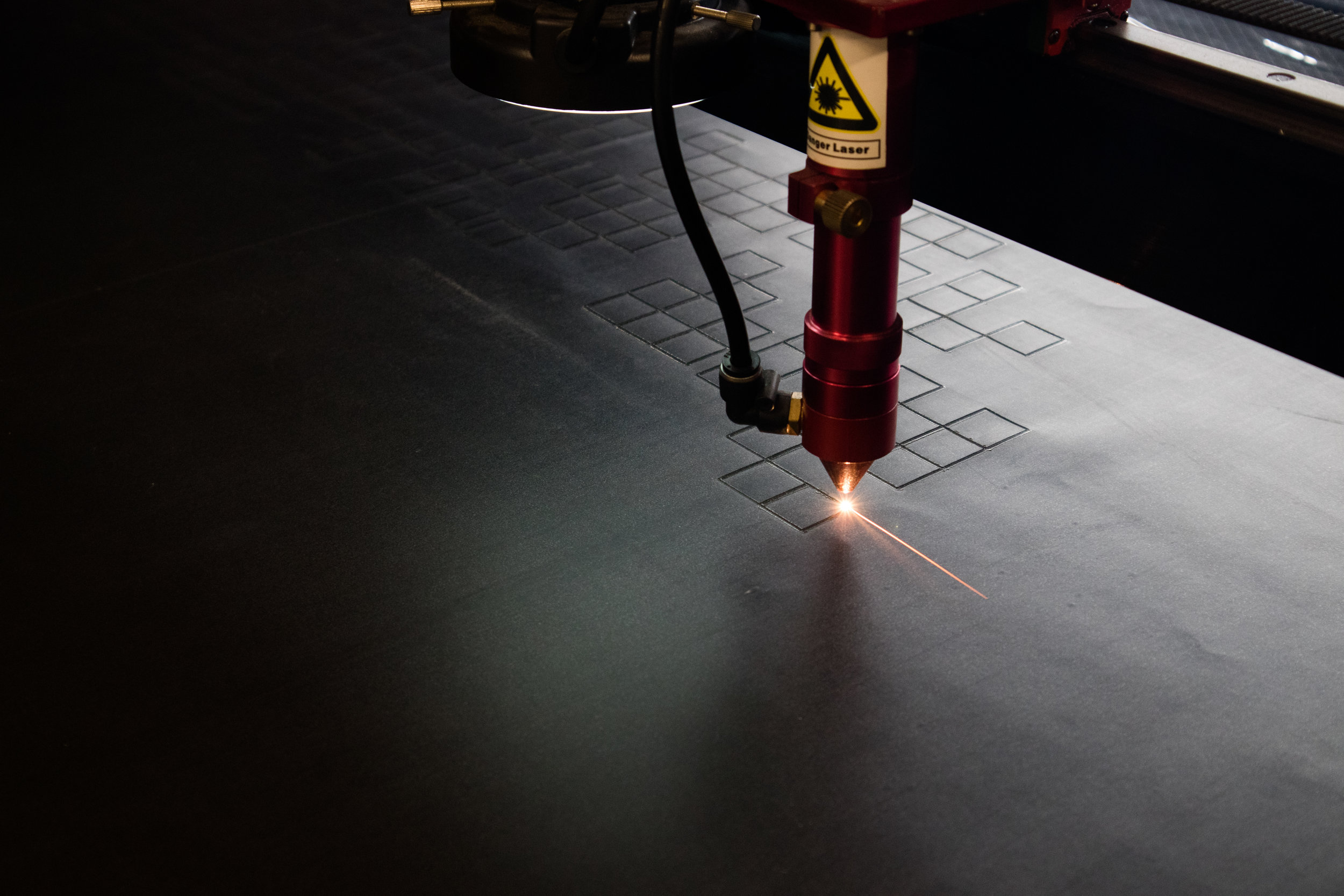
// Prototyping at Maxport
The prototype was made in collaboration with Maxport Limited in Hanoi.





// The Outcome